零基础python教程
android
网络图
单调双端队列
熵
双目相机
大数据毕业设计
基础知识
433MHz自发电无线控制器
三星卡刷
集成测试
tryAcquire
跨境电商营销
HashTable
运维开发
贝叶斯
mysql 锁原理
CyberChef
CommonJS
硬链接
Open3D
2024/4/12 4:17:51
open3d使用fpfh做点云配准
目录写在前面准备编译open3d配准example编译demo配准测试参考完写在前面
1、环境:win10,cmake3.22.0-rc1,环境:win10,cmake3.22.0-rc1,已编译好的open3d 0.13 2、源码使用的是官方example https://github.…

3D Vision--将点云投影至平面
contents写在前面几何原理python代码References完写在前面
1、内容: 如何将空间点投影至一个给定平面 2、环境: open3d 2、转载请注明出处: https://blog.csdn.net/qq_41102371/article/details/121482108
几何原理
空间点云投影到一个平面…
三种点云下采样方法(二)— open3d python
点云下采样是对点云以一定的采样规则重新进行采样,目的是在保证点云整体几何特征不变的情况下,降低点云的密度,进而可以降低相关处理的数据量和算法复杂度。上一节介绍了体素下采样的方法https://blog.csdn.net/suiyingy/article/details/124…

使用open3d分离背景和物体点云(二)
一、代码
Python
import cv2
import open3d as o3d
import matplotlib.pyplot as plt
import numpy as npdef thPlaneSeg(pointcloud):pcd_np = np.asarray(pointcloud.points)# 设置深度阈值 (假设Z轴是深度轴)depth_threshold = 0.196 # 1.0米# 应用深度阈值,移除远于阈值…

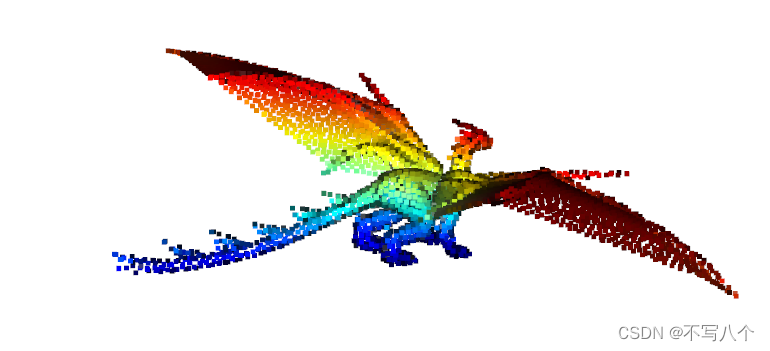
1、点云open3d初学(数据读取)
仅仅作为学习的记录,不喜勿喷。
(1)单条数据读取
import open3d as o3d
print("->正在加载一条点云数据... ")
pcd o3d.io.read_point_cloud("EaglePointCloud.ply")
print("->正在可视化点云") o…
如何使用Python的Open3D开源库进行三维数据处理
简介
在本文中,我提供了一个关于如何使用Python的Open3D库(一个用于3D数据处理的开源库)来探索、处理和可视化3D模型的快速演练。 使用Open3D可视化的3D模型(链接https://sketchfab.com/3d-models/tesla-model-s-plaid-9de8855fa…
open3d 0.13的c++版本使用demo
目录写在前面准备cmake完写在前面
1、环境:win10,cmake3.22.0-rc1,已编译好的open3d 0.13 2、这是一个将open3d 0.13作为库来使用的教程 3、源码使用的是官方demo https://github.com/isl-org/open3d-cmake-find-package open3d官网…
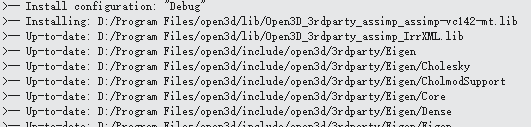
windows10编译open3d 0.13
目录写在前面准备获取源码cmakecmake版本开始cmake1、命令行:2、cmake-gui编译安装测试完写在前面
1、环境:win10,visual studio2019,cmake3.22.0-rc1,下载源码的时间:20211028 2、本文编译的是open3d 0.1…

ubuntu1604安装open3d 0.9.0版本
目录问题使用新版本的open3d在ubuntu1604上装0.9.0参考完问题
ubuntu1604只支持open3d 0.9.0版本 http://www.open3d.org/docs/0.9.0/getting_started.html
使用新版本的open3d
要使用新版本可以更换系统(ubuntu1804以上或者windows),安装好python环境后&#x…
三种点云下采样方法(一) — open3d python
点云下采样是对点云以一定的采样规则重新进行采样,目的是在保证点云整体几何特征不变的情况下,降低点云的密度,进而可以降低相关处理的数据量和算法复杂度。下面介绍三种点云下采样方式。最远点采样等方法后续会在深度学习章节中进行详细介绍…
三维点云质心与三角化 — python open3d
1 质心介绍 质心概念与重心的计算方式相同。如下所示: (1) 即 (2) 乘积mr相当于一个力矩,当作用点为质心时,总的力矩等于零。以杠杆或者天平来说,力矩为零的情况就是总体达…
点云旋转平移(二)—python open3d点云平移
点云旋转平移介绍,请参考上一节:点云旋转平移(一)—基础知识介绍_Coding的叶子的博客-CSDN博客。
本节所使用的示例pcd点云文件请参考:pcd格式点云样例文件-深度学习文档类资源-CSDN下载。
1 python open3d点云平移函…

点云配准(二)— python open3d ICP方法
上一节中介绍了点云配准的基础知识。本节将采用python open3d来进行点云配准。 open3d安装和点云配准介绍,请参考:
Open3d读写ply点云文件_Coding的叶子的博客-CSDN博客1 Open3d 安装Open3d是由Intel发布的一个开源库,支持快速开发和处理3D数…
点云缩放—python open3d
1 点云缩放 点云缩放是指尺度按比例缩放一定的倍数,点云数量保持不变。点云缩放的方法主要有numpy数组法、open3d缩放函数、open3d投影变换函数。 2 numpy 数组方法 通过将点云数组乘以一个缩放因子来改变大小,同时通过加法运算实现质心平移。
points …
点云仿射变换—open3d python
1 点云仿射变换 对于点云来说,仿射变换是将点云中的点按照同一规则变换。仿射变换包含了一组线性变换和一个平移变换。其中,线性变换可以用矩阵左乘来表示。因此,仿射变换可以用矩阵和向量的方式来表达。 (1)
即&…
两种点云分割(一)— RANSAC分割平面
点云分割的目的是将点云中属于不同部分的点加以区分。最直接的点云分割方法就是聚类,八种点云聚类方法(一)— DBSCAN_Coding的叶子的博客-CSDN博客这个在前面几节之中已经进行了详细介绍。本节将简要介绍另外几种点云分割的方法。采用深度学习…
八种点云聚类方法(一)— DBSCAN
传统机器学习聚类的方法有很多种,并且很多都能够应用在点云上。这是由于聚类方法一般是针对于通用样本,只是样本的维度有所不同。对于三维点云来说,其样本的维度为3。这里主要介绍几种典型的方法及其实现方式,包括DBSCAN、KMeans等…
python open3d点云可视化(本节会根据实际所用持续更新)
为了便于加强对点云数据的直观认识,前几章都是直接用with open来读取数据,这样能够更加直观地看到底层原始数据。点云可视化用到了mayavi,这个在点云展示方面比较好用。 现在,为了提高代码编写效率,暂时使用open3d作为…
Open3D 点云旋转之轴角式(Python版本)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 三维空间中表示旋转的方法有很多种,轴角式是其中非常经典的一种表示方式。虽然欧拉角表示旋转的方法很是常用,但欧拉角存在着万向锁这个问题,因此轴角式旋转在旋转使用中更为合适。其原理也很是明了,如下所述:…
Open3d读写pcd点云文件
1 Open3d 安装 Open3d是由Intel发布的一个开源库,支持快速开发和处理3D数据。Open3D在c和Python中公开了一组精心选择的数据结构和算法。后端是高度优化的,并且是为并行化而设置的。 Open3d直接使用pip安装即可。解决下载慢的问题,请切换下载…
open3d常用处理
目录pointcloudio点云平移visualization点云平面分割完pointcloud
open3d点云坐标表示为Vector3dVector
io
从文件读写点云:
pcd o3d.io.read_point_cloud(filename"./pcd_example.ply")
o3d.io.write_point_cloud(filename"./pcd_example1.ply…
自己的回忆录,记录自己的青春
说明
自己的工作经历,会持续更新,供大家参考。
智造家 在CAD二次开发耕耘多年,所以半年就稳定了局势;接着花了半年将代码全部重构了;之后又花了半年进行了第二次重构和宣传。无聊的时候,还给发现我软件缺…
如何学习、上手点云算法(二):点云处理相关开源算法库、软件、工具
写在前面 本文内容 一些用于点云处理的开源算法库、软件介绍,主要包含: CloudCompare, MeshLab, PCL, Open3D, VTK, CGAL等 不定时更新 平台/环境 Windows10, Ubuntu1804, CMake, Open3D, PCL 转载请注明出处: https://blog.csdn.net/qq_41…
如何学习、上手点云算法(三):用VsCode、Visual Studio来debug基于PCL、Open3D的代码
写在前面 本文内容 以PCL 1.14.0,Open3D0.14.1为例,对基于PCL、Open3D开发的代码进行源码debug; 如何学习、上手点云算法系列: 如何学习、上手点云算法(一):点云基础 如何学习、上手点云算法(二):点云处理相…
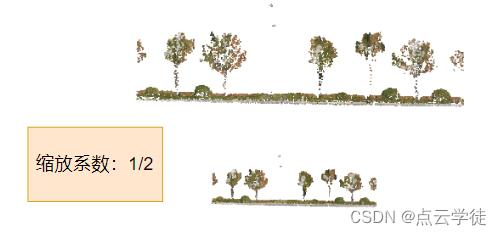
Open3D 反算点云缩放系数(21)
Open3D 反算点云缩放系数(21) 一、算法介绍二、算法实现1.方法12.方法2(通用)一、算法介绍
上一章按照指定的系数,对点云进行了等比例缩放,这里输入缩放后的两块点云,反算二者之间的缩放系数。
二、算法实现
已知使用的俩点云是1/2的缩放关系,用于验证计算结果是否…
『OPEN3D』1.1 点云处理
目录
1.open3d中的点云IO
2.点云的可视化
3 点云voxel下采样
4. 顶点法线估计
5.最小外界矩
6. 凸包计算
7. 点云距离计算
8. DBSCAN clustering聚类
9. RANSAC(Random Sample Consensus)
10. 点云平面分割
11. 隐藏点移除
12.outliers移除
13 最远点采样…
open3d 0.17.0的open3d.visualization.ViewControl类有bug
1. 问题描述
在使用过程中发现open3d.visualization.ViewControl的如下方法,在open3d 0.17.0环境下不起作用,点云的显示视场还是默认配置;而在open3d 0.16.0环境下却正常工作。
rotateset_frontset_lookatset_upset_zoom
2. 测试代码
imp…
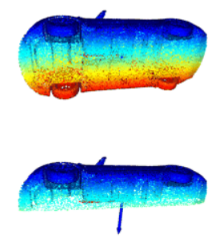
Open3D 基于最小生成树的法线定向 (27)
Open3D 基于最小生成树的法线定向 (27) 一、算法介绍二、算法实现一、算法介绍
法线计算的方向通常都存在方向问题,用Open3D估计的点云法线,是在每个点的局部进行拟合,估计的法线方向并不一致,Open3D提供了使用最小生成树调整法线到统一方向的方法,下面是具体的实现代码…
Open3D 点云高程归一化(基于2维地面点,Python版本)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 之前的博客中Open3D 点云高程归一化(基于地面点,Python版本)是基于三维空间进行最近地面点的查询操作,这里对其进行修改一下,将点云投影到水平面,基于二维空间进行最近地面点的查询,这种方式对一些较为陡峭的…
【点云】生成有凹凸的平面
文章目录 前言高斯函数原理代码保存 测试测试1 :领域曲率代码测试2:高斯曲率代码 加上噪点测试1测试2改进 前言
尝试用一些数据生成有凹凸面的点云。 我们姑且把z轴当成有凹凸的缺陷,x轴和y轴共同组成一个平面。 高斯函数
原理
高斯函数wi…
Open3D 多个点云配准(C++版本)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 多路配准(多个点云配准)是指在全局空间中对齐多个几何块的过程。输入的数据可以是点云或深度图像 P i P_i P
open3d教程(一):open3d的安装和测试(Python版本)
1 介绍
Open3d:用于3D数据处理的现代库。
Open3D 是一个开源库,支持快速开发处理 3D 数据的软件。 Open3D 前端在 C++ 和 Python 中公开了一组精心挑选的数据结构和算法。后端经过高度优化,并设置为并行化。我们欢迎来自开源社区的贡献。
2 Open3d安装和测试
2.1 Python…
为什么Open3D可视化TensorFlow张量速度超慢
问题描述
在使用Open3D可视化TensorFlow张量表示的点云时速度超慢
原因分析
可能是因为Open3D没有针对tf.Tensor做优化,也可能是tf.Tensor本身没有对张量的操作做优化,所以可能如果要在CPU中计算,numpy可能性能更好。
解决方案
open3d.u…
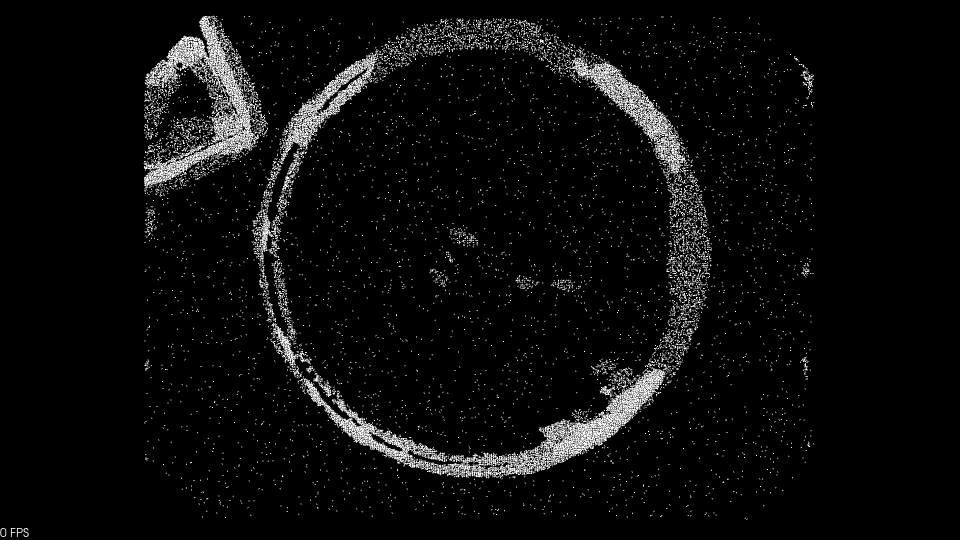
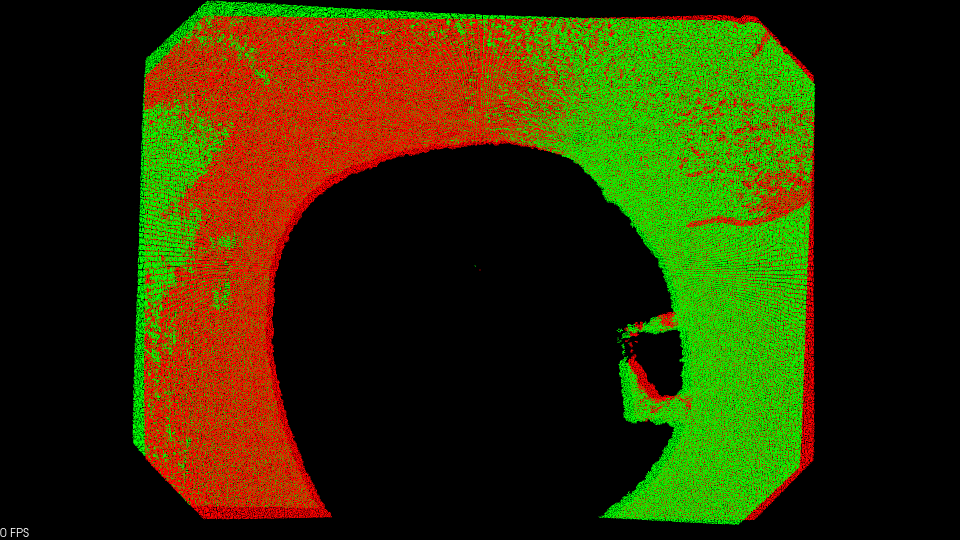
open3d 显示人体面部区域
1.使用cv2读取彩色图像和深度图像
2.深度图像转点云
3.只保留面部区域的点云
4.显示 import cv2 import numpy as np import open3d def depth2xyz(depth_map,depth_cam_matrix,flattenFalse,depth_scale1000): fx,fy depth_cam_matrix[0,0],depth_cam_matrix[1,1] …
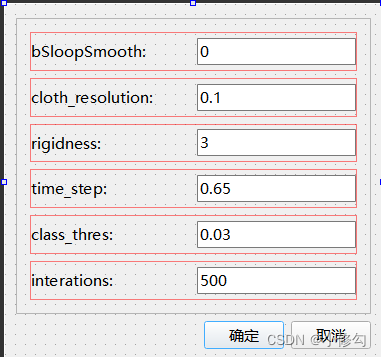
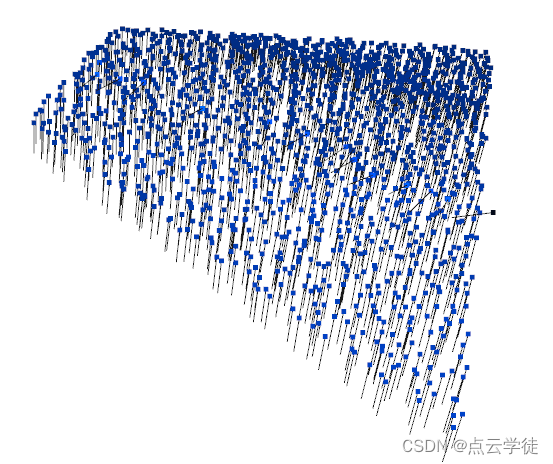
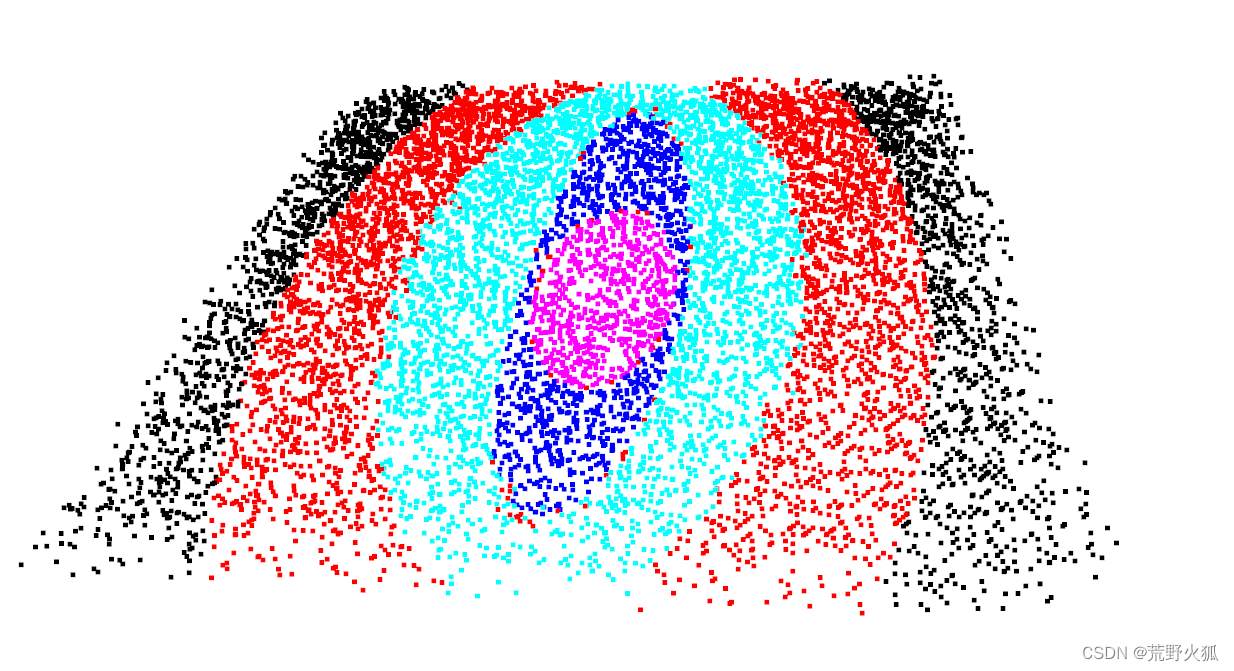
《open3D+pyqt》第二章——CSF(布料模拟算法)
《open3D+pyqt》第二章——CSF布料模拟算法 一、效果展示二、qt设置及相关教程三、核心代码一、效果展示 二、qt设置及相关教程
参考博客 :CSF 注:csf经常用于处理las点云,本文安装laspy添加las格式点云,具体教程看IO部分教程
步骤1:建立UI pyuic5 -o filter_csf_rc
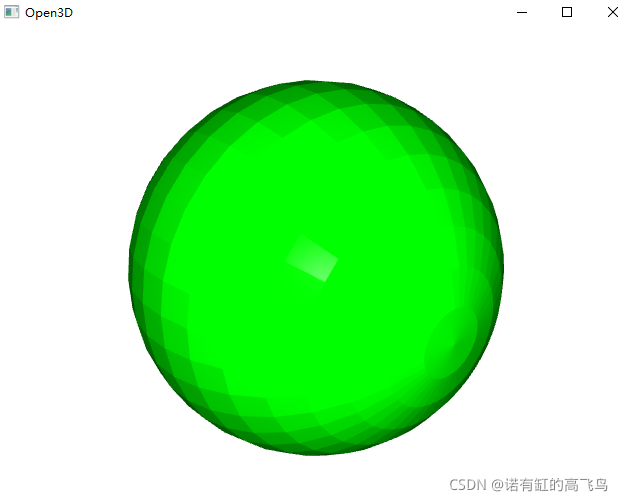
open3d教程(二):可视化三维模型,并转换成点云(Python版本)
1、三维模型获取 可以自己用建模软件建立一个模型从free3d免费下载 2、关键函数
open3d.visualization.draw_geometries
参数:
geometry_list(List[open3d.geometry.Geometry]):要可视化的几何体列表.window_name(str, optional, defaultOpen3D)&…
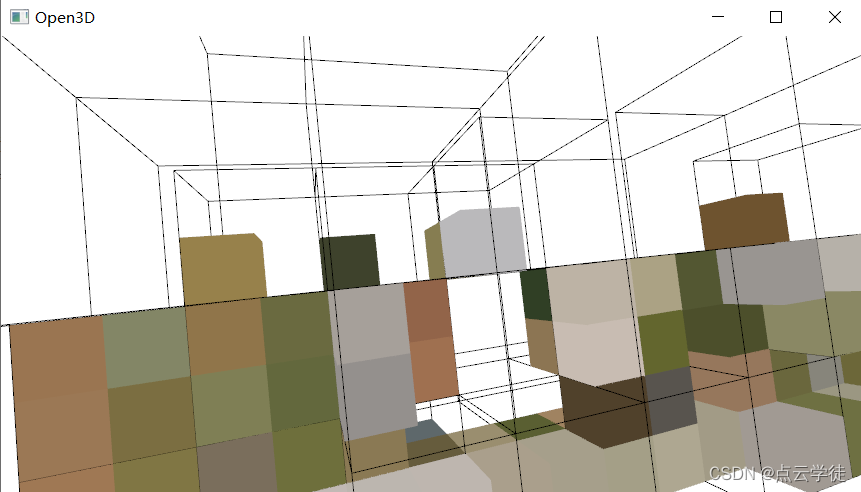
Open3D 从体素网格构建八叉树(14)
Open3D 从体素网格构建八叉树(14) 一、算法简介二、算法实现1.代码2.效果一、算法简介
上一章介绍从点云构建八叉树,对点云所在体素进行了可视化显示,这里可以对体素构建八叉树,可视化显示八叉树的具体划分结构。
二、算法实现
1.代码
代码如下(示例):
import op…
Open3D 网格体素化(C++版本)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 点云和三角形网格是非常灵活的,但它们都属于不规则的几何类型。体素网格是在常规3D网格上定义的另一种3D几何类型,且体素可以被认为是2D像素的3D对应物。Open3D理所当然的提供了体素几何类型VoxelGrid,可用于处理…
用RGB图像和深度图去生成一个点云图像
def create_pcd_from_rgbd(rgb_img, depth_img):"""*Compute point cloud from depth*"""#depth_img 单位umt1 time.time()depth depth_imgrgb rgb_img#[:, :, ::-1]h,w,chrgb_img.shapexmap np.arange(w)ymap np.arange(h)xmap, ymap np…
基于Open3D的点云处理16-特征点匹配
点云配准
将点云数据统一到一个世界坐标系的过程称之为点云配准或者点云拼接。(registration/align)
点云配准的过程其实就是找到同名点对;即找到在点云中处在真实世界同一位置的点。
常见的点云配准算法: ICP、Color ICP、Trimed-ICP 算法…
【最详解】如何进行点云的凹凸缺陷检测(opene3D)(完成度80%)
文章目录 前言实现思路想法1想法2想法3 补充实现想法1想法2代码 想法3代码 总结 前言
读前须知: 首先我们得确保你已经完全知晓相关的基本的数学知识,其中包括用最小二乘法拟合曲二次曲面,以及曲面的曲率详细求解。若还是没弄清楚࿰…
2022年6月和7月的工作经历
6月 3D打标软件 3D打标软件,要求在Open3d上加几个2D文字。大致有如下几个方案: 依葫芦画瓢,但O3DVisualizer派生于gui::Window,我的程序派生于Visualizer。工作量不小。 利用OpenGL输出文字,Baidu的两种方法一个编…

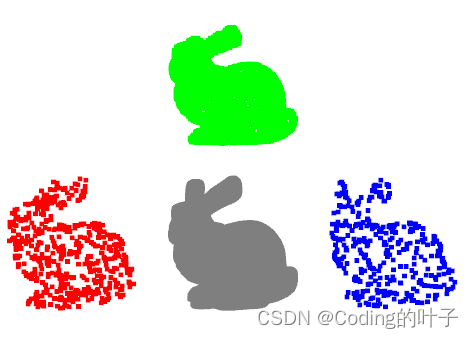
【三维语义分割】三维点云语义分割可视化
三维点云语义分割结果可视化的目的是更加直观地看到语义分割的效果。上一节详细介绍了PontNet点云分割,具体内容请参考三维点云语义分割 — PointNet详解(二)_Coding的叶子的博客-CSDN博客。本节仍然以上一篇PointNet源码为例。
1 数据介绍 …

open3d可视化对应点连线
目录写在前面准备修改源码Registration.hRegistration.cpp使用编译与使用参考完写在前面
1、本文内容 open3d点云配准时,添加点对连线,用于可视化当前的correspondences 2、平台 windows10, visual studio 2019 3、转载请注明出处: https://…
Open3d读写ply点云文件
1 Open3d 安装 Open3d是由Intel发布的一个开源库,支持快速开发和处理3D数据。Open3D在c和Python中公开了一组精心选择的数据结构和算法。后端是高度优化的,并且是为并行化而设置的。 Open3d直接使用pip安装即可。解决下载慢的问题,请切换下载…
点云离群点剔除 — open3d python
离群点一般是指偏离大部分数据的点,可能是由于随机误差造成异常点。离群点剔除的方法有很多种,例如基于统计、邻近度、密度、方差等方法。这里主要介绍open3d中实现的三种点云离群点的剔除方法,包括无效值剔除、统计方法、半径滤波法。
1 无…

点云旋转平移(三)—python open3d点云旋转
点云旋转平移介绍,请参考上一节:点云旋转平移(一)—基础知识介绍_Coding的叶子的博客-CSDN博客。
本节所使用的示例pcd点云文件请参考:pcd格式点云样例文件-深度学习文档类资源-CSDN下载。
1 python open3d点云旋转函…
三维点云重建 — open3d python
这里三维点云重建是指根据三维点云重建目标的表面或轮廓,即表面重建。三维点云是一批离散的点,这样空间中必然回有一些位置是空的,没有数据信息。点云重建是让三维物体的表面都由一个个平面组成,即在表面处成为连续状态。这里仅介…
Python点云处理(十八)点云地面点提取——基于法向量算法
目录 0 简述1 算法流程2 应用领域3 优缺点4 算法优化5 代码实现6 代码结果0 简述
基于法向量的点云地面点提取算法主要依靠点云中点的法向量信息来进行分类。地面点通常具有较平坦的表面,即法向量与垂直于地面的方向接近。因此,该算法首先计算每个点的法向量,然后通过判断法…
Python点云处理(十七)点云地面点提取——基于格网算法
目录 0 简述1 算法流程2 优缺点3 实现4 效果5 结语0 简述
提取地面点是点云数据分析和处理中的重要任务,而点云格网法是一种常用的地面点提取方法。点云格网法(Grid-based Method),通过将点云数据划分为网格单元,根据高程值分析来实现地面点的提取。 1 算法流程
步骤1:…
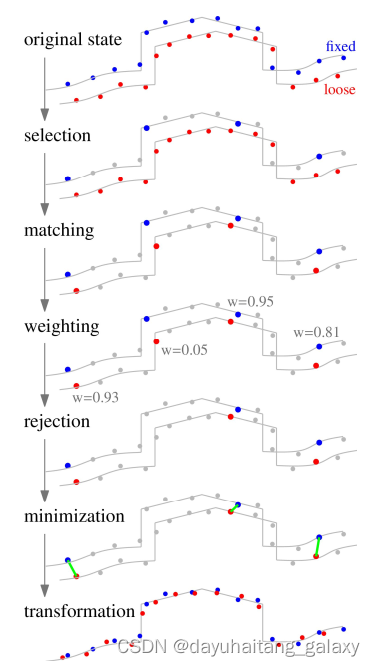
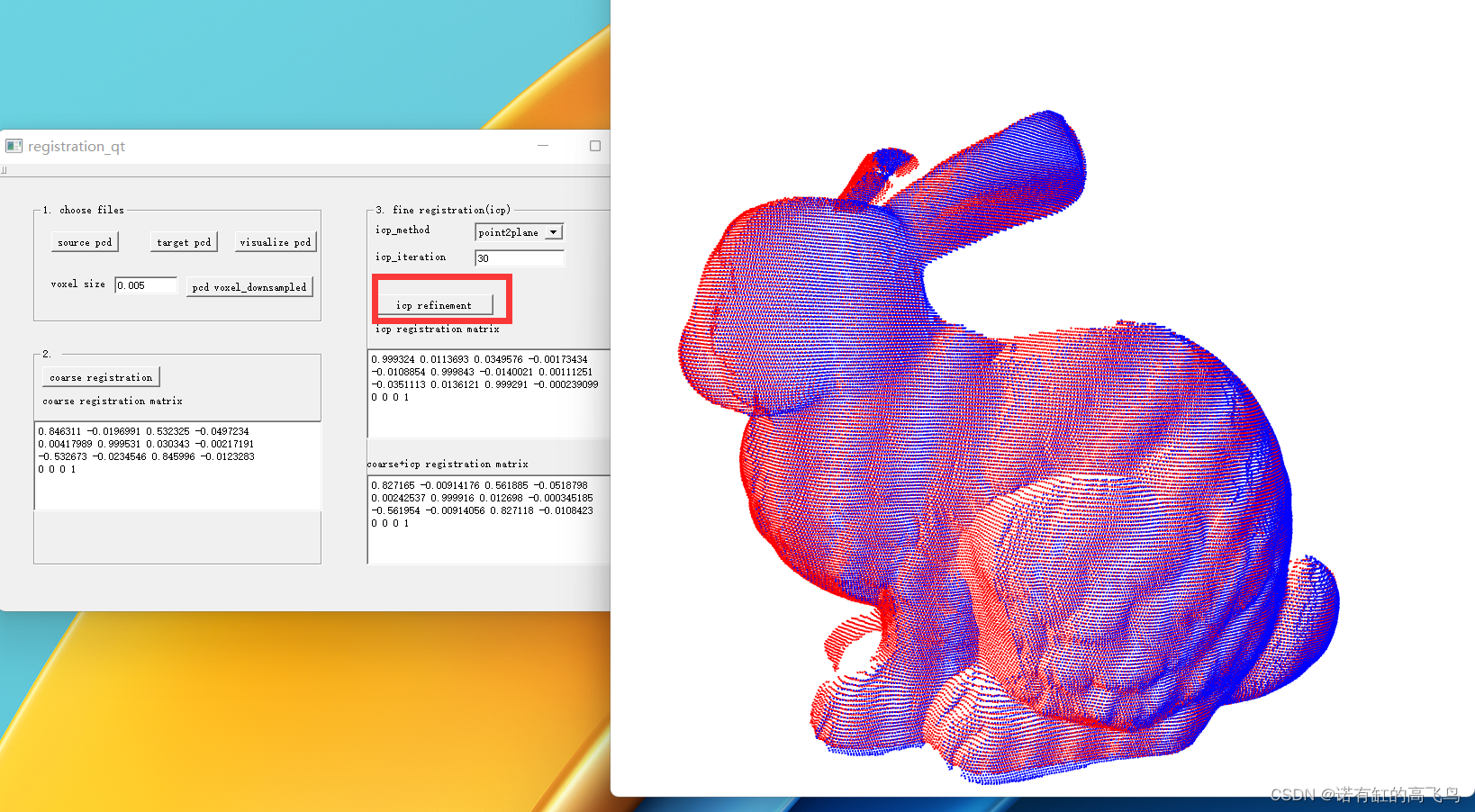
Open3D 点云与模型ICP配准(Python,详细步骤版本二)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 这是一个很有趣的功能,在真正进入主题之前,让我们先回顾一下点云与点云ICP算法的过程,如下图所示: (1)挑选发生重叠的点云子集,这一步如果原始点云数据量比较巨大,一般会对原始点云进行下采样操作。 (2)匹…
计算机视觉 用于网格/点云等数据可视化的Python库
一、3D可视化 很长一段时间,人们主要使用Matplotlib在Python中可视化3D内容。但是它不支持 GPU 硬件加速,所以很多人使用点云库(PCL)作为网格和点云可视化和分析的工具。PCL当然是用于 3D 分析的最佳库之一,而且它是用 C++ 构建的,Python包装器仅包含主PCL库功能的一小部…
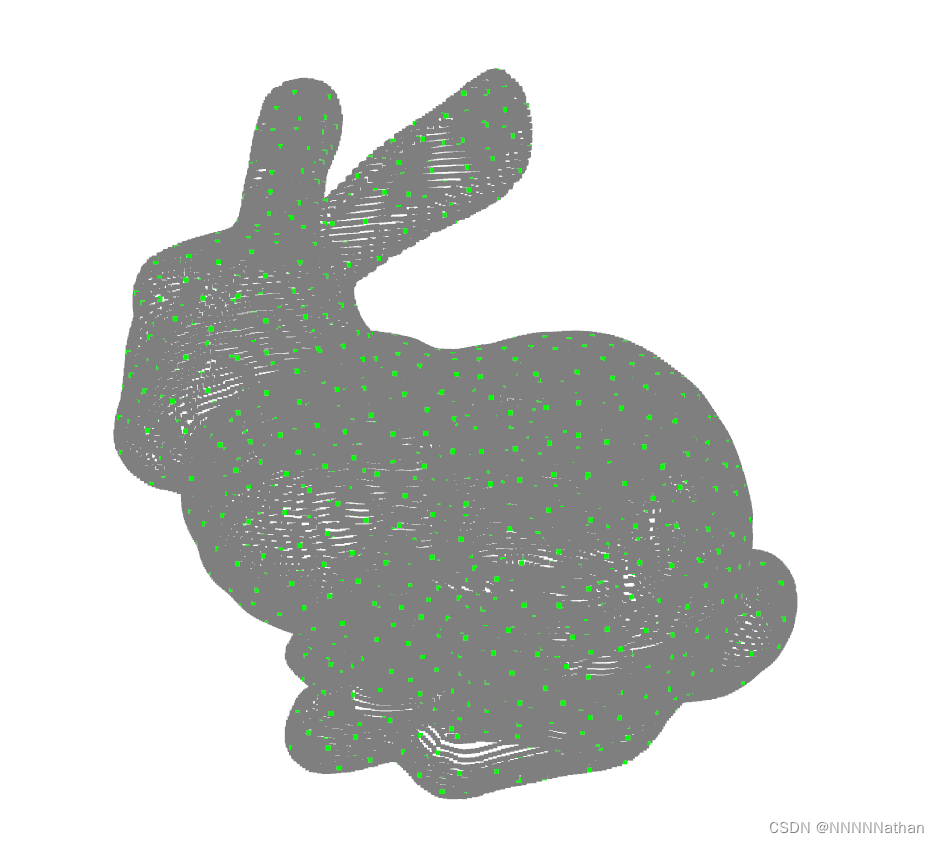
Open3D 最小二乘法拟合平面(SVD,Python版本)
文章目录 一、简介1.1最小二乘法拟合平面1.2 SVD角度二、实现代码三、实现效果参考资料一、简介
1.1最小二乘法拟合平面 之前我们使用过最为经典的方式对平面进行了最小二乘拟合(点云最小二乘法拟合平面),其推导过程如下所示: 仔细观察一下可以发现
基于Open3D的点云处理18-重建系统
参考
http://www.open3d.org/docs/release/tutorial/reconstruction_system/index.html 代码:Open3D/examples/python/reconstruction_system
Open3D 重建流程
组成点云片段(Make Fragment):这一步主要是读取图像与对齐的 深度…
[Open3d]: 知识记录
python api 官方手册:http://www.open3d.org/docs/release/ 可视化:http://www.open3d.org/docs/release/tutorial/visualization/visualization.html python-vis 参考代码:https://github.com/isl-org/Open3D/tree/master/examples/python/v…
点云处理【三】(点云降采样)
点云降采样
第一章 点云数据采集 第二章 点云滤波 第二章 点云降采样 1. 为什么要降采样?
我们获得的数据量大,特别是几十万个以上的点云,里面有很多冗余数据,会导致处理起来比较耗时。 降采样是一种有效的减少数据、缩减计算量…
在pycharm中,使用open3d得到pcd变量无法使用智能函数提示。解决方法
我们在pycharm中open3d的时候,读取数据得到的pcd变量无法使用智能提示符, 通常这样很麻烦,但是可以通过类型注解的方法解决这个问题。
方法如下:
1. 在注释中进行类型注解
import numpy as np
import open3d as o3d
pcd o3d.i…
点云处理【七】(点云配准)
点云处理
第一章 点云数据采集 1.点云配准
点云配准是将两个或多个点云数据集融合到一个统一的坐标系统中的过程。这通常是为了创建一个完整的模型或融合从不同视角采集的数据。 点云配准一般分为粗配准和精配准,粗配准指的是在两幅点云之间的变换完全未知的情况下…
点云学习(1): 获取点云的包络框
1. 记录一些容易忘记的点云操作----后续一定补充
1.获取点云的包络框
下面的get_axis_aligned_bounding_box(),get_min_bound(),get_max_bound()等函数非常好用
import open3d as o3d
import numpy as np# 读取点云数据
pcd o3d.io.read_point_cloud("input.pcd"…
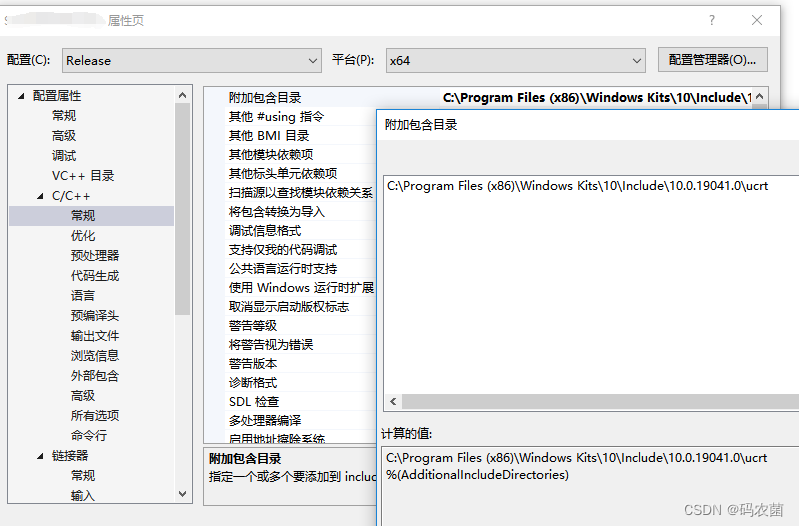
调用Open3d接口报错:E0282 全局范围没有 “localeconv“及E0070 不允许使用不完整的类型
Open3D已经编译好,在新建一个C工程测试接口的时候出现了以下报错
严重性 代码 说明 项目 文件 行 禁止显示状态
错误(活动) E0070 不允许使用不完整的类型 EnvTest F:\Program Files (x86)\Microsoft Visual Studio\2019\Community\VC\Tools\MSVC\14.29.30133\incl…
Open3D 三维数据类型和io
目录 Open3D 三维数据类型Open3D ioimage iopoint cloud iotriangle mesh io Open3D 三维数据类型
点云:某个坐标系下的点数据集,每个点包括三维坐标X,Y,Z、颜色、分类值、强度值、时间等信息。 储存格式:pts、LAS、PCD、xyz、asc、ply等 Mesh:多边形网格,是计算机图形学中用于…

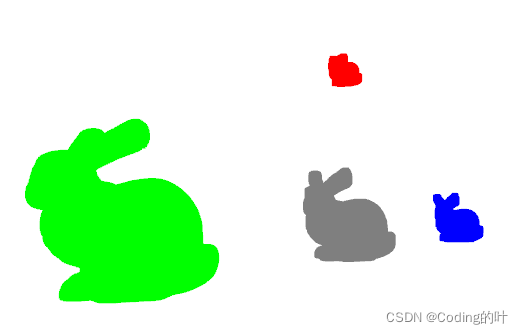
点云处理【六】(点云分割)
点云分割
第一章 点云数据采集 1. 点云分割
点云数据中包含目标物体,点云分割算法即将物体分割出来。
2 分割算法
2.1 RANSAC(随机采样一致性)方法
基于随机采样一致性的分割的步骤如下: 1.从一个样本集S中,随机抽取n个样本,…

open3d.core导入失败问题
官网的例子中需要导入o3c但是我的代码提示导入失败,百度一下没有找到问题所在 多次测试后发现。
可以不用import open3d.core as o3c
使用的时候直接 o3d.core.tensor就可以了 import open3d as o3d
#import open3d. as o3c
import numpy as np
import matplotl…
基于Open3D的点云处理17-Open3d的C++版本
参考:
http://www.open3d.org/docs/latest/cpp_api.htmlhttp://www.open3d.org/docs/latest/getting_started.html#chttp://www.open3d.org/docs/release/cpp_project.html#cplusplus-example-projecthttps://github.com/isl-org/open3d-cmake-find-packagehttps:/…
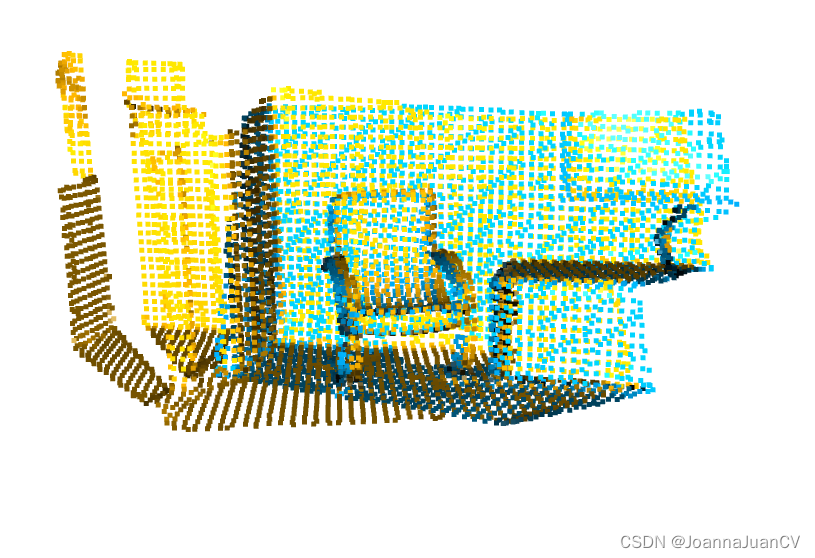
Open3D 获取两片点云的公共重叠区域(24)
Open3D 获取两片点云的公共重叠区域(24) 一、算法介绍二、算法实现1.代码2.结果一、算法介绍
要获取两片点云的公共重叠区域,使用以下步骤: 对每一片点云构建 KD 树。 遍历第一片点云的每一个点,并使用 KD 树在第二片点云中找到最近邻点。 通过比较最近邻点之间的距离与阈…

Open3D Pyntcloud 读取点云和网格并可视化(含txt读取方法)
本文主要介绍两种读取点云和网格的方法,一种是通过open3d读取,另一种是通过pyntcloud读取,最后通过open3d进行可视化。第三种是通过pyvista读取再可视化。
Open3D 官方文档,版本:0.13.0,安装命令ÿ…